|
Robots don't see the world like humans do, at least not yet. They
don't recognize discrete objects and have little common
sense—that it's better to drive over a bush than a rock, for
instance. Instead of seeing, today's robots measure. They use
a variety of sensors—cameras, laser range finders,
radar—to gauge the shape, slope, and smoothness of the terrain
ahead. They then use these data to figure out how to stay on the
road and avoid obstacles. At least that's the idea, but the DARPA
Grand Challenge showed it's a lot harder than it sounds. Here, see a
slide show of the major measuring techniques used by
the various teams.—Jason Spingarn-Koff

|
|
Laser Sensing
Laser scanners, commonly known as lidar (for light
detection and ranging), were the most
common sensor for Grand Challenge robots. A beam of light
bounces off a spinning mirror and sweeps the terrain ahead. By
measuring the time it takes for the beam to return, the sensor
can calculate the distance to objects. Line by line, the robot
builds a simple 3-D model of the terrain in front of the
vehicle. Many teams used several laser scanners to increase
the amount of detail. Team DAD even built a custom sensor with
64 spinning lasers. But laser scanners have limitations: They
see only a narrow slice of the world and have a relatively
short range (60 to 150 feet). The beams also can't detect
colors and may bounce off shiny surfaces, so it's hard to spot
certain hazards (such as a body of water). They're also bad
for stealthy applications, such as those preferred by the
military, because they emit light.
|

|
|
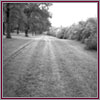
Video Cameras
Video cameras see fast and far—all the way to the
horizon. They can measure the texture and color of the ground,
helping robots understand where it's safe to drive and
alerting them to dangers. And since cameras don't emit light,
they are well suited for stealthy operations. But there's a
serious drawback: it's difficult to use just one camera to
figure out the size and distance of objects ahead. Recent
research by Andrew Ng at Stanford suggests this is possible in
some circumstances—by analyzing road edges,
texture, and converging lines—but this needs more
testing and wasn't used in the Grand Challenge competition.
Video cameras also have limited use at night or in dust storms
or other bad weather, and they can be blinded by bright light
such as the setting sun.
|
|
|
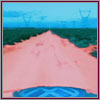
Adaptive Vision
The Stanford team invented a technique called "adaptive
vision," which allows its robot, Stanley, to see farther and
drive faster, even as the road changes over different types of
terrain. Here's how it works: Stanley uses its laser range
finders to locate a smooth patch of ground ahead and samples
the color and texture of this patch by scanning the video
image. It then looks for this color and texture in the rest of
the video image. If a smooth "road" extends about 130 feet
toward the horizon, Stanley knows it can speed up. If the road
suddenly changes, the robot slows down until it figures out
where it is safe to drive.
|
|
|
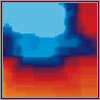
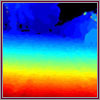
Stereo Vision
Inspired by the way humans see, some teams used two video
cameras in a technique called stereo vision. Princeton,
TerraMax, and Team DAD (in the first Grand Challenge, in 2004)
all tried the technique, with varying degrees of success. In
the technique, two cameras are mounted side by side, and
software measures the slight shift between the two incoming
images. (You can try this yourself by holding a finger at
arm's length and looking at it only with your right eye, then
only with your left eye; your finger will slightly "jump.")
The shifts are then compiled into a "difference map," which
crudely shows the distance of approaching objects (represented
here by different colors). The problem is that objects in the
far distance look largely the same to both cameras, limiting
the accuracy where it matters most: for high-speed driving.
|
|
|
Radar
These sensors use radar (from radio detection
and ranging) to send out radio waves to a target and
measure the return echo. They can see far into the distance,
even through dust clouds and bad weather (which easily foil
cameras and may degrade lidar). The downside is that radar
beams are not as precise as lasers; objects that aren't really
obstacles often appear, confusing the robot. Carnegie Mellon's
Red Team used radar as a second sensor, complementing lidar to
spot large objects far ahead. Carnegie Mellon researchers are
developing a more sensitive unit. Called solid-state
millimeter wave radar, this could be a potent sensor on future
robots.
|

|
|
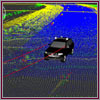
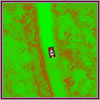
Cost Map
Many Grand Challenge robots used this software technique to
find the road and avoid obstacles. First the program compiles
data from any variety of sensors (laser scanners, cameras,
radar) and builds a map of the terrain ahead. By finding
smooth areas and pinpointing obstacles, the program can divide
the world into areas for driving that are good ("low cost")
and bad ("high cost"). In this image from Stanford, green
represents laser measurements, while black represents unknown
grid cells or no measurements. Red signifies grid cells that
are judged to be not drivable (obstacles), while white
signifies grid cells judged to be drivable (road).
|
|
|
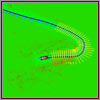
Path Planning
This software program allows the robot to find the best path
from point to point, even as it avoids obstacles. Some robots
use a searching algorithm, a sort of mathematical recipe, to
figure out every possible path, then compare each to the cost
map to find which path is best. They must also factor in how
fast to go and which paths are physically impossible (e.g.,
sharp turns could cause a rollover). As they're driving, the
robots must constantly update their paths to stay on the
racecourse and steer toward the finish.
|

|

|
