
|
 |
 |
Fire | Car | Plane | Ship Chuck Thorpe runs the Navlab group in the Robotics Institute of Carnegie Mellon University. His interests are in computer vision, planning, and architectures for outdoor robot vehicles. Since 1984, the Navlab group has built a series of 10 robot cars, HMMWVs, (aka "Hummers") minivans, and full-sized passenger buses. The research is funded by the Defense Advanced Research Project Agency (DARPA) for building off-road scout vehicles, and by the U.S. Department of Transportation for traffic safety and automated highways. NOVA: Why do we need automated cars and highways? Thorpe: We need cars that are much more intelligent than the cars that we have today. This is not because we want to take people out of the cars, but because we want to help people get to where they need to get to much more safely and much more efficiently than we can today. People have done a good job driving. But there's so much traffic congestion, and there are so many accidents still left that the only way to get better surface transportation is to have automated cars, automated trucks, and automated buses with all of the sensors that can help people do the driving.
Thorpe: My interest in highway safety really goes back to when I was a little kid in 1963. My dad is an emergency room physician. In 1963 he declared a woman dead who was thrown out of her car in an accident and run over by her own car. My dad went out that night and bought seatbelts and put them in our car. See, in 1963, that's how you got better safety. You put seatbelts in cars, you built Interstate highways, and so forth. Now our cars have seatbelts and airbags and anti-lock brakes. The cars have gotten a lot safer. We have the Interstate highway system, which is now officially complete. So we've reduced a lot of those causes of the accidents. We're left with the 90 percent of the accidents that are caused at least in part by people. We haven't figured out a way to make the people smarter. That's why this gives us a chance to make the people smarter. We have the sensors around the car. We have some of the processing and some of the intelligence. We can help people drive, we can automate part of the driving systems. We can have smarter cars and smarter roads. NOVA: Can you tell us more about the extent to which human error is involved in car accidents? Thorpe: Ninety percent of all of today's accidents are caused at least in part by human error. About 70 percent of those are caused predominantly by human error. The other 20 percent have some kind of component of human error that helped cause the accident. So anything that we can do to give people eyes in the back of their head by having other sensors around—to give them a better feel for the road, give them better warning systems—any of that will help reduce fatalities. Anything that we can do then to further automate the system makes it even safer and makes it even more convenient.
Thorpe: This is hard work, there's no doubt about it. We've had people out here all night, every night for the last two months developing this technology getting ready for the demo. It's also great fun. The work is fun, because it's a great kick to go out there and ride around on these automated vehicles and see how well it works. But even more importantly, it is for mortal stakes. We still have 40,000 fatalities per year in the United States alone, about the same number in Europe. Anything we can do to reduce that number of accidents is a big win. NOVA: Is there any way to quantify how many accidents could be avoided as a result of the technology? Thorpe: Trying to figure out how accidents would be reduced requires a lot of very careful work. For instance, part of the project I'm working on involves single vehicles that run off the road. So we've gone through the accident statistics trying to figure out why people drive off the road. Then we've gone through the technology to figure out how long a warning we can provide them. Now what we're starting to do is to go through the road database and find out how wide the shoulders are, to find out if we could provide a two-second warning—or on what proportion of roads will that actually help save people from having an accident. When we're done doing all of those statistical analyses, we'll have some good statistics on how many accidents we can prevent. NOVA: Is this purely an American project, or is it worldwide? Thorpe: This project has worldwide significance. The problems that we're dealing with here with accidents and fatalities are really too big to get nationalistic about. We cooperate quite well with other people. For many years I have gone to the technical conferences and shared very freely with the Europeans, the Japanese, other Pacific Rim people. It's an international community. We're working on the same problems. We have the same motivation. I hope that we can cooperate and solve the problems together.
Thorpe: The most difficult research problem in this whole project has been perception. How do you see? How do you give the computer the chance to see what's going on around you? Some things, like radars, are pretty good for finding big metal objects, but you want not just to know there are big metal objects, you also want to look at pedestrians and at traffic zones and at people on motorcycles and lots of things around you. So we've put a lot of effort into computer vision. We've put a lot of effort into designing new laser scanners and other sensors like that. That's one set of issues. There's a whole second set of issues involving things like defensive driving. So we've not been able to take it out here and run on the roads, but we have running in simulation back in the labs all of the rules of defensive driving that you were taught when you learned how to drive. Don't drive next to somebody if you can drive behind them or in front of them, so you have a safe place to move to. Don't drive too close to the person in front of you. Be polite to the other drivers around you. Some of that we've been able to demonstrate today because we have the sensors, and we can tell what some of the other drivers are doing. Some of that we're still working on in the lab. NOVA: Anyone who's used computers knows they crash inevitably. What kind of chaos would that create if the system breaks down? Thorpe: The system is designed to have lots of levels of redundancy in it. People are used to riding on things like elevators that are computer controlled, and elevators are reliable. A hundred years ago people weren't sure that they trusted elevators until Mr. Otis had himself hauled up 45 feet in the air and had the cable chopped and showed that his safety brake held. We have to do the same kind of things as we get ready to introduce this. We have to show that there are multiple levels of safety so that if any one thing fails there's enough redundancy left in the system to keep it running safely to get you safely off the road or turn control back to the driver. NOVA: A lot of people really like to drive, they really like the control of driving. Why would people want to give up that control? Thorpe: For people who like to drive, we're not going to force them to give up control. They can still drive. I get two reactions from people like that. One is, "I don't want to have any of this automated stuff. But I sure wish that guy who was tailgating me did." And certainly some of the other people in the traffic flow will have the automated systems and that will make their vehicles much more polite and much safer and so forth. The second reaction that I get is, "I really like to drive but every once in a while I don't notice something. It sure would be nice to have these sensors just to alert me. I can still drive but I can use these sensors to make me a safer driver."
Thorpe: People are going to be excited about this once they get a chance to come out and actually experience it. Part of our strategy in the way that we built our scenario is to treat it very much like cruise control. So you can turn it on and off like cruise control, you can go faster and slower. Then there's a couple of other buttons that do things like close up the gap to the car in front of you or back away or make you change lanes automatically. So by giving a very familiar environment like cruise control, by introducing these functions one at a time, people will get used to it, they'll be comfortable, and they'll be looking forward to the next feature as it shows up. NOVA: Do you think this is going to give people more free time, more time with their families, more time to do the things they enjoy doing while they have to commute or drive? Thorpe: I would certainly love to have an automated vehicle so that when I'm doing my daily commute I can be talking on the phone or working on my laptop computer, so when I get home I'm done with all that and I have time to spend with my family. NOVA: What happens if you get a flat tire or suddenly the driver becomes ill, has a heart attack, something like that? How do you troubleshoot those things? Thorpe: There are a lot of contingencies that you need to worry about when you're building a system like this. If you have a flat tire or a blowout—first of all that's going to be much less likely because we'll have the computer sensing the tire pressure all the time. If that does happen some of the research that's gone on here shows how you can control a vehicle well enough to bring it over to the side of the road and stop even if it has a flat tire. If the driver becomes sick, or when it comes to the off ramp at the end of the automated travel, and asks the driver if the driver is ready to take over, if the driver doesn't take over and do a competent job, the system will automatically pull the vehicle over to a safe spot, bring it to a halt, and send out a distress signal.
Thorpe: How you enter and exit the automated highway depends on which system we end up building. Certainly for some of the congested downtown areas it makes sense to have a dedicated lane that only has computer-controlled vehicles on it. There may be a check-in station similar to the gated on-ramps that exist in congested areas, or to a toll booth where the roadway checks the vehicle to make sure that all of the automated systems are functioning and then lets it go onto the road with all the other automated vehicles. For some of the rural applications like driving across the country we can't have a dedicated lane because there are only two lanes. So if you took away one of the lanes and made it just for the automated vehicles, that would only leave one lane for the manual passengers. For there we'll treat the system just like cruise control. You'll drive the vehicle on the road and when you want to turn on the automated system you'll push the automated button. The system will do a self-test on board its own system and will see that the radar is working, see that the controllers are working and so forth before it takes control. NOVA: When do you think this will actually occur? When will people actually be driving on automated highways? Thorpe: Parts of the system are going to be ready very soon. Some of the warning systems on the bus and on the truck are commercially available now. You can go out today and buy a radar that warns you if you're getting too close to somebody in front of you. Some of the warning systems for running off the road will happen in the near term. The ultimate, automated highway, completely hands off, feet off—it's hard to predict when that's going to happen. There are all of the technical issues, but there are also all of the social issues and the liability issues. Those are some of the questions that we in the consortium are going to be dealing with over the next four years. If you look at the time scale to build a new road, it takes about 20 years to plan a road, go through the environmental clearance, get the funding, and actually go out and build it. So certainly within the time frame of building brand new roadways we'll have the vehicles ready to run on them.
Thorpe: After the demonstration is over we have a chance to sit down and analyze what happened. We'll look at the other research that is going on in parallel with the demonstration. We'll start to decide which of the technologies and concepts are most promising. Eventually we'll select a single prototype, build it, and spend several months in really rigorous testing. NOVA: What advice would you give young people who are interested in getting involved in this field? Thorpe: The most important way to prepare for this kind of work is to cultivate your curiousity. Building robot cars is both lots of work and lots of fun. It takes mechanical engineering, electronics, computer science, psychology, and civil engineering. It also takes imagination and just plain common sense. Certainly it's important to study science and math. But it's also important to try building things, to get a sense for what might work and what probably won't. I spent a lot of time as a kid with building blocks, erector sets, model airplanes, and eventually tinkering with mini-bikes and motorcycles. I probably broke more things than I fixed. But I had fun, I figured out how things worked, and I developed a sense of what it would be fun to build for a career. Photos: (1) NOVA/WGBH Educational Foundation; (2-7) National Automated Highway System Consortium. Escape Through Time | Skydive | Human Response Survivor Stories | Pioneers of Survival | Survival Strategies Resources | Teacher's Guide | Transcripts | Site Map | Escape! Home Editor's Picks | Previous Sites | Join Us/E-mail | TV/Web Schedule About NOVA | Teachers | Site Map | Shop | Jobs | Search | To print PBS Online | NOVA Online | WGBH © | Updated November 2000 |
 Chuck Thorpe
Chuck Thorpe
 This computer simulation illustrates one way an
Automated Highway could be designed.
This computer simulation illustrates one way an
Automated Highway could be designed.
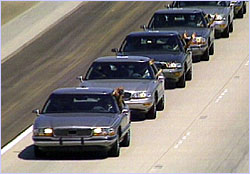
 This line of computer-driven cars traveling at 65
miles per hour is a powerful demonstration of how
close we may be to automated driving.
This line of computer-driven cars traveling at 65
miles per hour is a powerful demonstration of how
close we may be to automated driving.
 It may take many highly visible demonstrations like
this to convince the public that the automated car is
a safe and practical idea.
It may take many highly visible demonstrations like
this to convince the public that the automated car is
a safe and practical idea.
 Thorpe hopes new automated features would be
considered similar to today's cruise control.
Thorpe hopes new automated features would be
considered similar to today's cruise control.
 An on-board computer checks into the Automated
Highway System.
An on-board computer checks into the Automated
Highway System.
 The highway of the future? Only time will tell.
The highway of the future? Only time will tell.